Content Over Internet!
Mind scraping over the internet for information.
Table of contents
- Biomimicry is Real World Inspiration
- Reasons you should start using biomimicry in your design projects right now!
- Planetary Exploration using Bio-inspired Technologies
- An Origami Inspired Robot That Can Fold Itself Like a Paper
- Structural, Deployable Folds - Design and Simulation of Biological Inspired Folded Structures
Biomimicry is Real World Inspiration
Metadata
- Title: Biomimicry is Real World Inspiration
- URL: https://carnegiemnh.org/biomimicry-is-real-world-inspiration/
Highlights & Notes
- Our understanding of space, time and our place in nature are beyond that of other animals. But sometimes, we look to nature for inspiration.
- Biomimicry is when we observe a trait in nature and copy it or parts of it for human technology and design.
- Scientists studied the pads on the toes of one species, the Tokay gecko, and discovered that tiny, microscopic hairs help them “stick” to surfaces.
- By mimicking gecko toes, we have developed adhesives, a way to close wounds without stitches, and more
- Learning how ant columns move can help us improve highway traffic, especially as autonomous vehicles develop.
- Humpback whale wind turbines. The ridges on the pectoral fins of humpback whales create an aerodynamic flow in water. They also inspired the shape of wind turbine blades.
- Spider web glass. A spider’s web is one of the strongest designs in nature. The webbing pattern has been copied by automotive industries so that windshields crack but do not shatter.
Reasons you should start using biomimicry in your design projects right now!
Metadata
- Title: Reasons you should start using biomimicry in your design projects right now!
- URL: Rethinking Future - Architecture Projects
Highlights & Notes
- biomimicry is just the idea of using the natural design of the environment to inspire our design projects.
- Biomimicry works on the principle that nature has already come up with solutions to many of the problems we are trying to fix in its 3.8-billion-year history.
- The application of biomimicry and bio-utilization can contribute to sustainable building materials and projects. Biomimicry is based on life’s principles
- We definitely can and should find a new way that not only benefits humans but the natural environment as well
Planetary Exploration using Bio-inspired Technologies
Metadata
- Title: Planetary exploration using bio-inspired technologies
- URL: JPL, California Institute of Technology
Highlights & Notes
- The spider is quite an ‘engineer’. Its web may have inspired the fishing net, fibers, clothing and others.
- Octopus as a model for Biomimetics
- Adaptive shape, texture and camouflage of the Octopus
- Plants use of camouflage
- To protect from premature damage - initially, fruits are green, have sour taste, and are camouflaged by leaves
- Once ripped, fruits become colorful and tasty, as well as have good smell.
- Biomimetic robotic exploration of the Universe
- The mountain goat is an inspiring model for all-terrain legged rovers
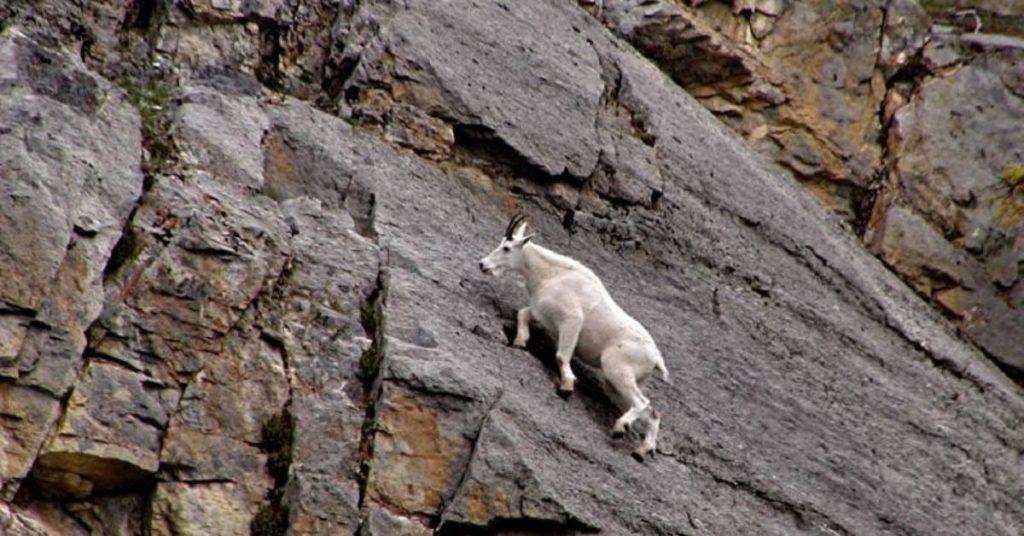
- LEMUR (Limbed Excursion Mobile Utility Robot), a 6 legged robot
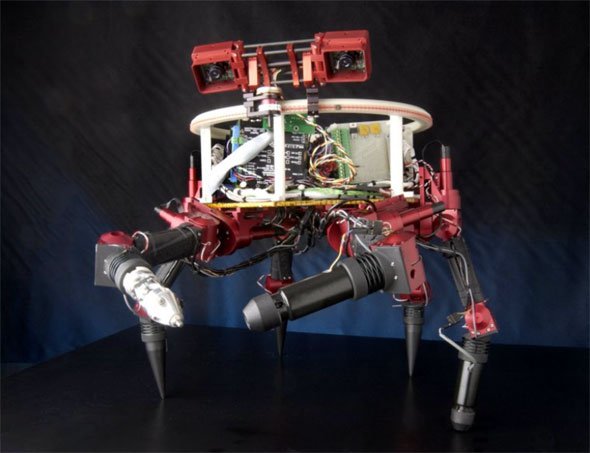
- The mountain goat is an inspiring model for all-terrain legged rovers
- Biomimetics in support of Space Exploration
- Search for preserved bio-signatures and habitable regions
- Deep Drilling
- Artificial muscles as actuators
- Humanlike robot for planetary exploration
- Parallel processing algorithms
- Snake like robotics for traversing through narrow openings and passages to conduct maintenance and inspection functions.
- Search for preserved bio-signatures and habitable regions
- Making Intelligent humanlike robots
- Telepresence - where a remote operator controls the robot
- Full autonomous - Potentially, future will look at cognition capability
- JPL’s RoboSimian robot

An Origami Inspired Robot That Can Fold Itself Like a Paper
Metadata
- Title: An Origami Inspired Robot That Can Fold Itself Like a Paper
- URL: technocrazed article
Highlights & Notes
- design of an origami inspired robot which can change the size of its wheel according to the obstacle and load
- The wheel design is based upon the traditional paper folding technique named as ‘Magic Ball Pattern’.
- The origami inspired robot consists of two wheel which can change their shape, as well as, climb up the stairs. The wheel can change its radius based on the size of objects it is going to climb over. It can squeeze or increase its radius accordingly.
- The robotic wheel has been created by the Professor Kyu-Jin Cho who told how the wheel is able to squeeze or expand its radius. He told that the wheel can squeeze and expand to the radius of 2 and 4 inches respectively. Each wheel is equipped with only one actuator only and the sensors outside the wheel calculate where the obstacle actually is.
- The issue with the contemporary robots is that the robot is either speedy or powerful but not both. This new robot comes with both these characteristics. It can decide how much it needs to squeeze or expand to have required speed and torque.
Structural, Deployable Folds - Design and Simulation of Biological Inspired Folded Structures
Metadata
- Title: Structural, Deployable Folds - Design and Simulation of Biological Inspired Folded Structures
- Authors: Daniel Baerlecken, Russell Gentry, Matthew Swarts and Nixon Wonoto
- Software: Grasshopper with rhinoceros
Highlights & Notes
Introduction
- This paper presents a concept of folding as a form generator for a structural system that allows the ability to deploy large spanning structures
- The paper not only reviews a type of biological inspired folding – with special focus on kinetic and structural properties - but also discusses the problems of producing these forms at the building scale
- The research first presents a catalogue on leaves, petals and insect wings, documenting their different tectonic and kinetic systems, which is used to investigate and develop a new range of physical systems – generated on the basis of biological analogies
Approach
- the research started with the selective modeling of folding mechanisms in nature as found in the different leaf species, such as maple leaves and hornbeam leaves, as well as insect’s wings, segments of earwigs, grasshoppers, crickets, and praying mantis
- Saussurean approach
- The material used for the initial structural modeling was PETG (glycol-modified polyethylene terephthalate): a thermoform able, flexible material. Stiffened fabric structures were considered as an alternative
- Structures suitable for human habitation are likely to be two orders of magnitude larger than wing scale, leave scale or paper scale, and part of the scaling problem concerns the thickness of the material. If the material thickness (t) increases linearly with the other dimensions, then the flexural rigidity of the edges will increase as t3.The subsequent ability to fold the large-scale sheet will be dramatically reduced, if not eliminated.

- In the hornbeam leaf study, the Miura-ori pattern is naturally occurring, which has been previously applied to large solar panel arrays for space satellites by Japanese astrophysicist Koryo Miura.A folded Miura-ori fold can be packed into a very compact area and its thickness is only restricted by the thickness of the folded material.The fold can also be unpacked in just one motion by pulling on opposite ends of the folded material, and likewise folded again by pushing the two ends back together
- Conceptually, the kinematic mechanisms of action origami overlap with those of bar and strut tensegrity systems. Miura and Notori proposed the use of a quadrilateral 4-fold mesh for deploying solar arrays in space and this pattern has come to be described as Miura-ori
Geometric principles of the Miura Ori pattern
Material Selection for Miura-Ori
- The flexibility demonstrated in paper-scale origami is generally not present in load-bearing structural materials at full-scale, due to the fact that flexural stiffness of plates increases with the cube of the plate thickness. Therefore, it is difficult to conceive of bending large-scale materials in the way that paper is folded. In this research, we focus on the use of modified polyethylene terephthalate (PETG) as a substitute for paper.
- PETG was selected as a material due to its high deformation capacity with the idea that the hinge could be made inherent in the material as opposed to as a kinematic add on